
Perfecting pain-free colonoscopies
Every year, a million people in the UK undergo a colonoscopy. The procedure involves doctors using a flexible viewing tube, inserted through the patient’s anus, to examine the lining of the large bowel and carry out surgical interventions as necessary. Although simple in principle, colonoscopy is a skilled procedure that requires much training and practice to perform well and safely.
A research team in the STORM (Science and Technology Of Robotics in Medicine) Laboratory at the University of Leeds is perfecting an alternative to the conventional system. It uses a magnetically guided instrument controlled by a joystick. The tubes of conventional colonoscopes incorporate a camera, a light source, an irrigation system, and a means of sampling or removing tissue of concern. Using a tube of roughly the same diameter, the new and more flexible instrument has all these facilities. The key difference lies in its tip, which houses a small magnet. Moreover, with the help of artificial intelligence (AI), a robot can conduct the investigations.
Leading the STORM team is Professor Pietro Valdastri, Chair in Robotics and Autonomous Systems. He began working on magnetically guided colonoscopy in 2008, developing it first in Italy, then in the US and, since 2016, in Leeds. “At Scuola Superiore Sant’Anna, we had the idea of using magnetic control to eliminate tissue stretching and pain,” he explains. “However, we did not realise how difficult it was to control a magnet inside the human body without knowing its position and orientation.”
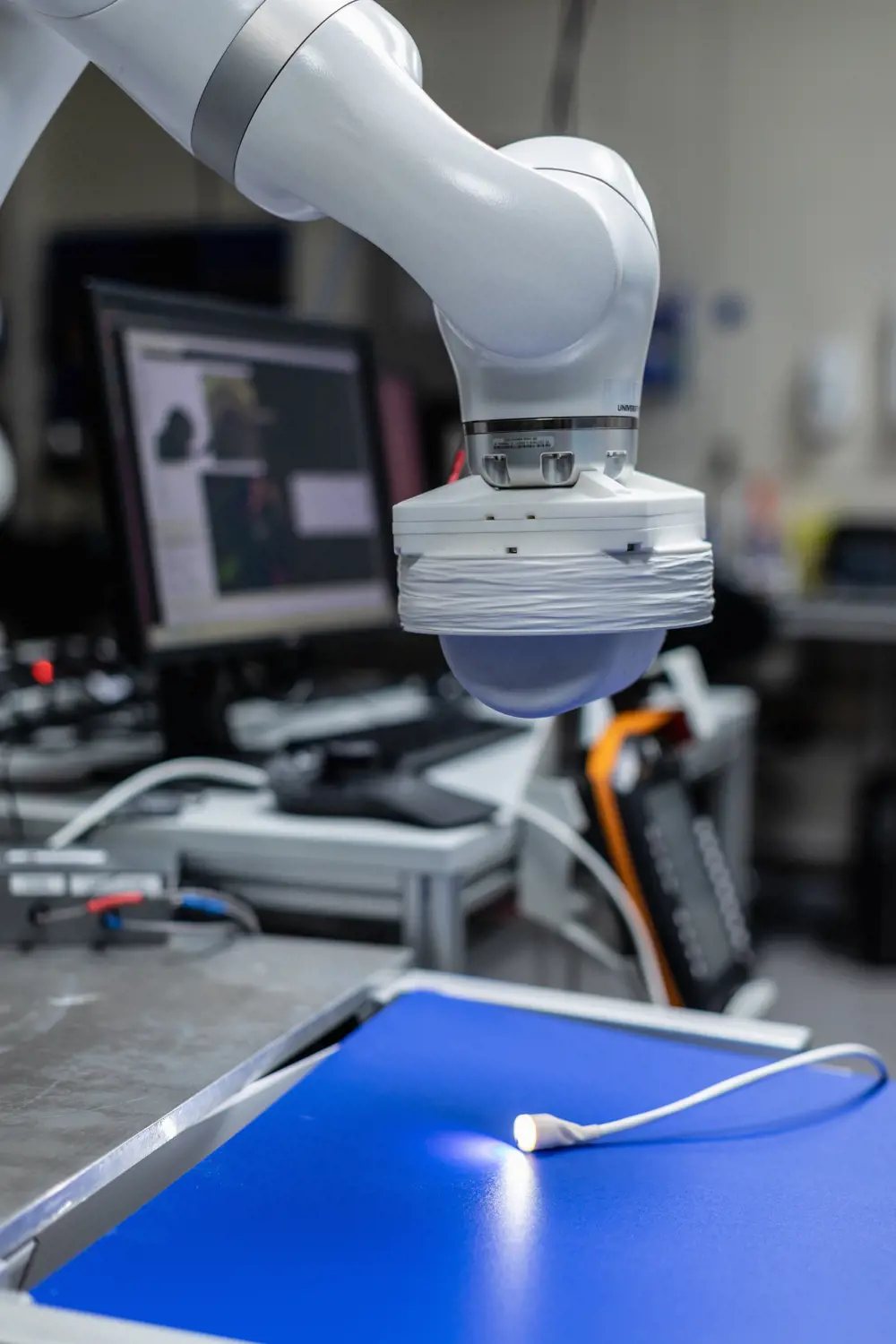
The magnetic arm and colonoscope © Mark Webster Photography / University of Leeds
Magnetic guidance
To move and guide the new colonoscope the operator uses another more powerful external magnet mounted on a robotic arm that can move across and around the patient’s abdomen. Steering the tube is impossible without knowing the exact whereabouts of the two magnets. “The key to success,” Professor Valdastri says, “was to develop a localisation technique that works in real time so we know the relative positions of the external magnet and the magnetic tip of the instrument inside the body.”
With the patient lying on the operating table, the doctor inserts the tip of the colonoscope into the anus. The instrument is steered by a simple joystick and a computer translates its movements to change the position and motion of the external magnet, so varying the direction of the magnetic field that pulls the instrument through the colon. A magnetically guided colonoscope can reach its desired destination at the upper end of the bowel in less time than a conventional one.
This “front wheel drive”, as Professor Valdastri describes it, has its advantages. If the colon were a straight tube, simply pushing the instrument to advance it would be fine. In fact, the colon curls round on itself, and while the tip of a conventional colonoscope can be steered, the rest of its length relies on the gut wall to bend it appropriately. The inevitable pressure on the sides of the colon, and its consequent stretching, may cause discomfort for the patient. Guiding the endoscope via magnetism allows the operator to apply force at its tip, pulling rather than pushing the instrument and lessening the pain.
Incorporating AI into the instrument’s controls gives the robot partial autonomy. Turning the instrument’s tip back on itself – for example to view something that would otherwise be hidden – requires a complex manoeuvre best undertaken by the computer.
It is also possible to use image analysis technology to give the robot complete autonomy. Just as doctors conducting a bowel examination use the view from the instrument’s camera to guide their actions, so too can the robot. Image analysis can be employed to identify the centre of inside the colon and enable the computer to keep steering the tip of the instrument towards it. The robot would be instructed to pull the magnetic tip of the instrument to the far end of the colon; the operator would then take over, examining the image of gut lining while slowly withdrawing the colonoscope.
Inbuilt safety constraints prevent even the maximum strength of the magnetic field from moving the colonoscope with a force sufficient to damage the gut tissues. The magnetic field’s strength is no greater than that already used routinely in magnetic resonance imaging (MRI scans).
Expanding endoscopes
Professor Valdastri’s endoscopic ambitions are not confined to the colon. Aiming for an even more demanding target, he is also developing what he calls “magnetic tentacles” for reaching into the finest branches of the lung’s airways. Just two millimetres in diameter, each soft and flexible tentacle has tiny, embedded magnets throughout its length. Its movement and conformation is determined by two robotically controlled external magnets able to set up and vary the complex magnetic field required to coax the tentacle along its assigned route.
Professor Valdastri’s endoscopic ambitions are not confined to the colon. Aiming for an even more demanding target, he is also developing what he calls “magnetic tentacles” for reaching into the finest branches of the lung’s airways.
Navigation in this case is dependent on a prior scan of the lungs, and will require a three-dimensional map. Having chosen a route to whichever part of the lung’s interior is to be examined, a computer controls the movement of the external magnets, and so the tentacle’s passage into the lung. By this means it should be possible to sample tissue from otherwise inaccessible depths of the organ, and to deliver treatments directly to those regions.
Professor Valdastri plans to make his colonoscopes disposable, thereby avoiding the need for the elaborate and costly cleaning required by the current, very expensive reusable instruments. The savings should more than offset the capital cost of the robotic arms. The intellectual property underpinning the system is licensed to Atlas Endoscopy, a company spun out of Professor Valdastri’s laboratory. “The endoscope will be returned to the company,” he adds. “We have planned a net zero approach. Plastics will be recycled, while electronics will be cleaned and reused.” The simplicity of the controls will allow much of the procedure to be undertaken by staff with a nursing qualification.
Following initial testing on models of the human colon, the magnetically guided colonoscope has been demonstrated in animal experiments. These were conducted on pigs: a demanding choice since the pig colon is actually more convoluted than its human counterpart. The first trial on human patients is set for late 2023.
***
This article has been adapted from "Perfecting pain-free colonoscopies", which originally appeared in the print edition of Ingenia 94 (March 2023).
Contributors
Geoff Watts
Author
Keep up-to-date with Ingenia for free
SubscribeRelated content
Health & medical

A gamechanger in retinal scanning
2006 MacRobert Award winner Optos rapidly became a leading medical technology company and its scanners have taken millions of retinal images worldwide. There is even a display at the Science Museum featuring the Optos development. Alastair Atkinson, of the award-winning team, describes the personal tragedy that was the trigger for the creation of Optos.

Kidney dialysis
Small haemodialysis machines have been developed that will allow more people to treat themselves at home. The SC+ system that has been developed is lighter, smaller and easier to use than existing machines.

Engineering polymath wins major award
The 2015 Queen Elizabeth Prize for Engineering has been awarded to the ground-breaking chemical engineer Dr Robert Langer FREng for his revolutionary advances and leadership in engineering at the interface between chemistry and medicine.
Blast mitigation and injury treatment
The Royal British Legion Centre for Blast Injury Studies is a world-renowned research facility based at Imperial College London. Its director, Professor Anthony Bull FREng, explains how a multidisciplinary team is helping protect, treat and rehabilitate people who are exposed to explosive forces.
Other content from Ingenia
Quick read

- Environment & sustainability
- Opinion
A young engineer’s perspective on the good, the bad and the ugly of COP27

- Environment & sustainability
- Issue 95
How do we pay for net zero technologies?
Quick read

- Transport
- Mechanical
- How I got here
Electrifying trains and STEMAZING outreach

- Civil & structural
- Environment & sustainability
- Issue 95