
How do robots work?
Robots are generally made up of the same components: a movable physical structure, a motor, a sensor system, a power supply, and a computer to control the processes, which can be an external device or internal control system. Robots vary between being autonomous, semi-autonomous or manually controlled, and may have a humanoid form or be designed for a specific task.
The actuator is the part of a machine that moves and controls parts of the system
The actuator is the part of a machine that moves and controls parts of the system. The actuators connect to an electrical circuit, which powers the electrical motors and electromagnets directly or activates a hydraulic system through electrical valves.
In robots, the actuators are powered by a battery, solar power or mains power supply, and are usually one of the following:
- Hydraulic – hydraulic actuators have a cylinder or fluid motor that uses hydraulic power to create motion. As they are powered by liquid, which cannot be compressed, hydraulic actuators exert a large force.
- Pneumatic – pneumatic actuators use pressurised air to create movement, converting energy formed by a vacuum. This system enables considerable forces to be produced from relatively small changes in pressure.
- Electrical – motors power electric actuators to convert electrical energy into movement. These are more precise, quieter and easier to reprogramme than hydraulic or pneumatic actuators.
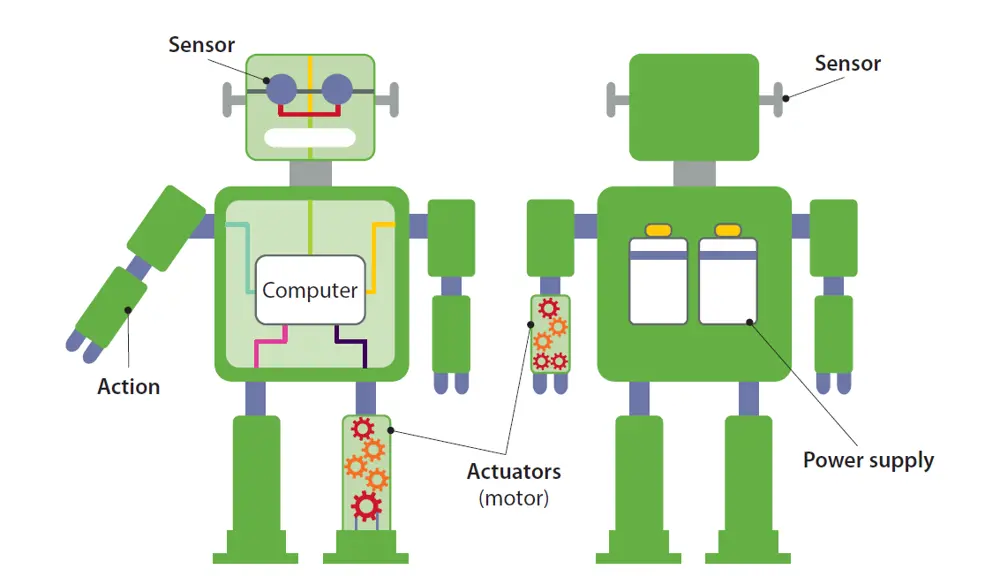
A robot’s core components allow it to sense its environment, then plan and carry out an action
The actuators are attached to an electrical circuit, which powers the electrical motors that activate them. For example, a hydraulic system is activated by manipulating electrical valves that drive the compressed fluid’s path through the machine. Then, to move a hydraulic arm for example, the robot’s controller would open the valve leading from the fluid pump to a piston cylinder attached to that arm. The fluid would extend the piston, swivelling the arm. To move their segments in different directions, robots use pistons that can push both ways. The robot’s computer controls everything that is wired to the circuit.
Engineers programme the computer to switch on the relevant motors or valves to carry out pre-planned tasks. Algorithms for specific tasks are programmed into the robot, which send the correct signals to the actuators.
Different robots use a variety of sensors, such as a photodetector and microphone help to identify light and sound, facial recognition systems to identify faces and ultrasonic transducers to detect how close an object is
Different robots use a variety of sensors, such as a photodetector and microphone help to identify light and sound, facial recognition systems to identify faces and ultrasonic transducers to detect how close an object is. While some robots can see and hear, most have the ability to sense movement. A simple design to allow a robot to sense its own movement incorporates slotted wheels on the robot’s joints. Beams from an LED light shine through the slots, and a sensor on the other side reads the pattern of flashing light as the wheel turns, sending data to the computer to analyse how far the joint has moved based on the light pattern.
Robots are already carrying out tasks in many industries, including healthcare, manufacturing, research and military, and look set to have further applications in many more.
***
This article has been adapted from "How does that work? Robots", which originally appeared in the print edition of Ingenia 74 (March 2018).
Keep up-to-date with Ingenia for free
SubscribeRelated content
Technology & robotics

When will cars drive themselves?
There are many claims made about the progress of autonomous vehicles and their imminent arrival on UK roads. What progress has been made and how have measures that have already been implemented increased automation?

Autonomous systems
The Royal Academy of Engineering hosted an event on Innovation in Autonomous Systems, focusing on the potential of autonomous systems to transform industry and business and the evolving relationship between people and technology.

Hydroacoustics
Useful for scientists, search and rescue operations and military forces, the size, range and orientation of an object underneath the surface of the sea can be determined by active and passive sonar devices. Find out how they are used to generate information about underwater objects.

Instilling robots with lifelong learning
In the basement of an ageing red-brick Oxford college, a team of engineers is changing the shape of robot autonomy. Professor Paul Newman FREng explained to Michael Kenward how he came to lead the Oxford Mobile Robotics Group and why the time is right for a revolution in autonomous technologies.
Other content from Ingenia
Quick read

- Environment & sustainability
- Opinion
A young engineer’s perspective on the good, the bad and the ugly of COP27

- Environment & sustainability
- Issue 95
How do we pay for net zero technologies?
Quick read

- Transport
- Mechanical
- How I got here
Electrifying trains and STEMAZING outreach

- Civil & structural
- Environment & sustainability
- Issue 95